
Joint Industry Project: APTITUDE Flaw Evaluation Software
By: Scott Riccardella, TJ Prewitt, Tyson Manning and Isaac Smith Aging pipeline infrastructure and past
By: Scott Riccardella, TJ Prewitt, Tyson Manning and Isaac Smith Aging pipeline infrastructure and past
Nuclear plant aging management programs require periodic inspections of liquid storage tanks. Traditional inspection methods
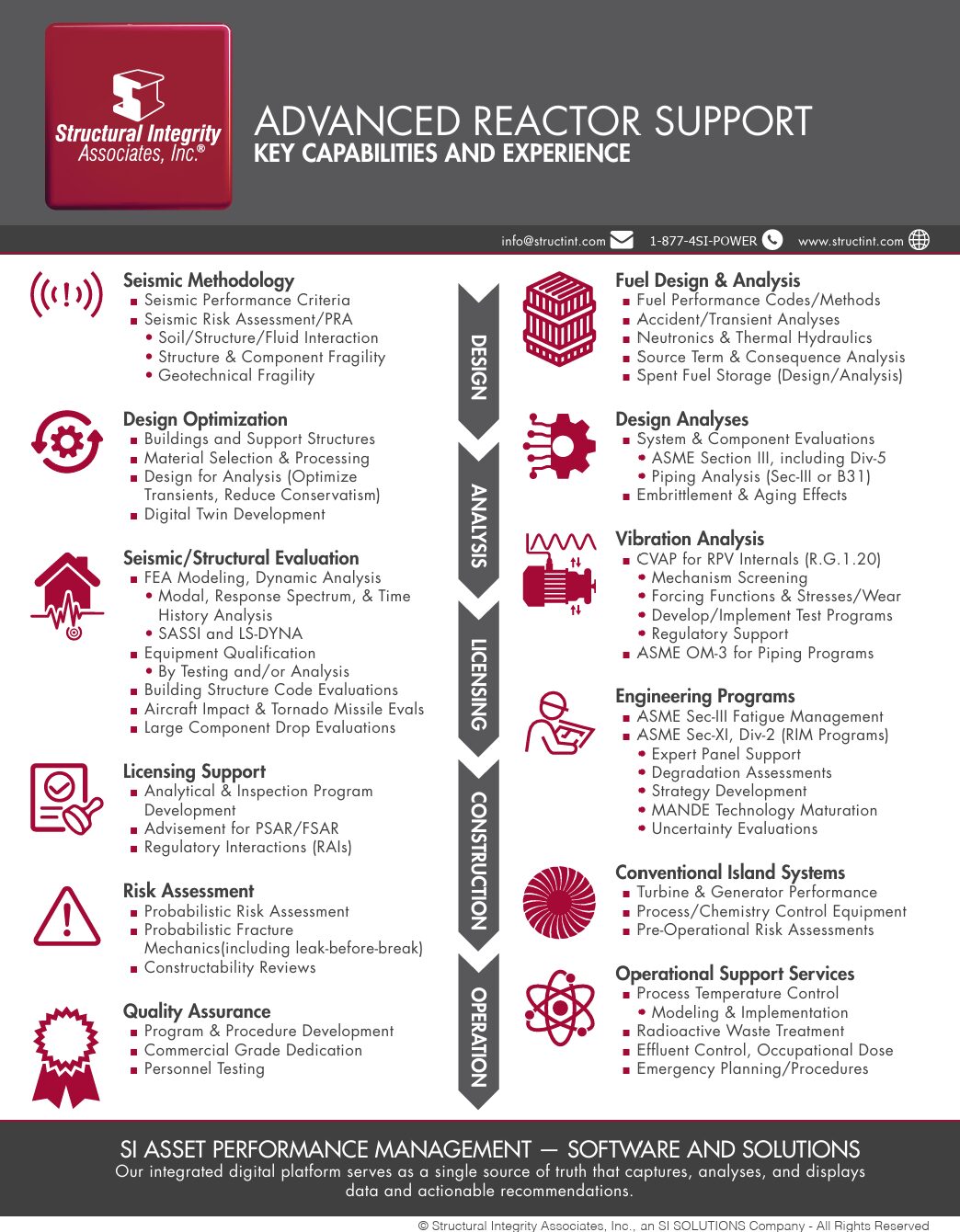
This brochure includes: Seismic, Design Optimization, Structural Evaluation, Licensing, Risk, Quality, Fuel, Analysis, Vibration, Programs,